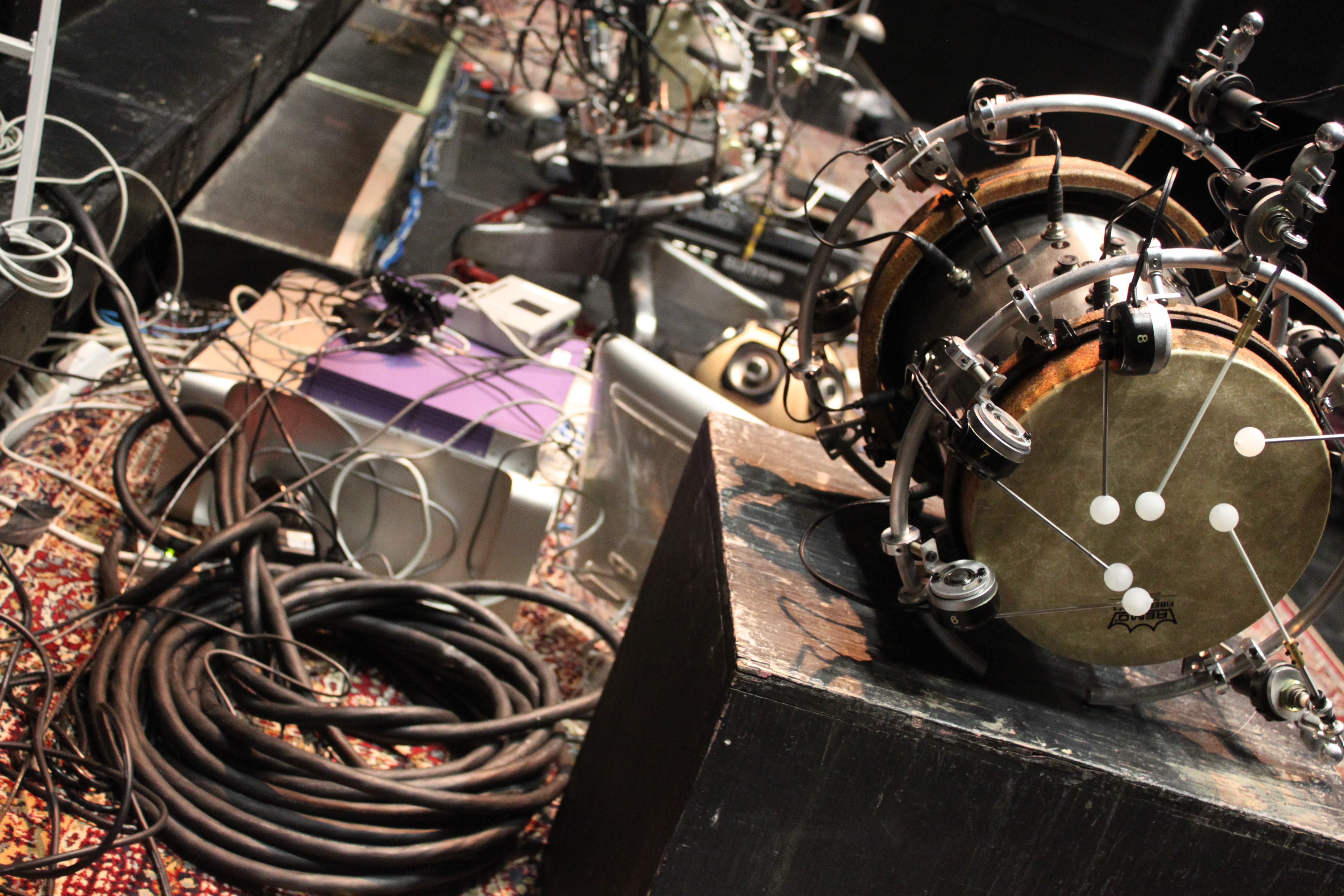
The NotomotoN has two types of beater assemblies each utilizing a different actuation technique. The two types of beaters used were the TrimpTron and the KalTron. The TrimpTron solenoid assembly makes use of a rotary solenoid mounted perpendicular to the NotomotoN’s drumheads. Its aluminum mounting bracket can be rotated on the robot’s superstructure, allowing for a wide variety of timbres as the drum head is struck in different places. The KalTron drumbeater assembly uses a modified pull-type solenoid arranged such that its linear motion is converted to rotational motion. The pull solenoids used in the KalTrons allow for very rapid-fire actuation: high-speed rolls are possible using the KalTrons. A chief design objective in the conception of the NotomotoN was the integration of power and electronics in the main body of the drum. The NotomotoN needs only two cables: one for power and a USB cable for communication.The electronics on the NotomotoN are powered via USB. The Actuators run off 24 Volt power supply built into the instrument. To communicate, the NotomotoN uses MIDI over USB. Open Sound Control has been implemented on the middleware to allow users flexibility in communication protocols.
Ajay Kapur, Michael Darling, Jim Murphy, Dimitri Diakopoulos, Jordan Hochenbaum
2010